Yesterday was a nice day out flying with the quadlugs 480mm, equipped with an SJ4000 camera, Immersion RC transmitter and Skylark OSD. It really adds another dimension to be able to know in real time, from the OSD, the GPS position, time of flight, battery voltage, altitude. All this information provides a different level of control while flying the quad.
I found particularly valuable to know how hight and how far from me the quad was, exactly.
I’d like to share a couple of shots of the quad here. A usual, you can click on the pictures to access the full sizes (which sometimes take a while to load, thanks for your patience 🙂 )
Check out the Quadlugs website to see the latest models, several came out since my first quadlugs build a few months ago.
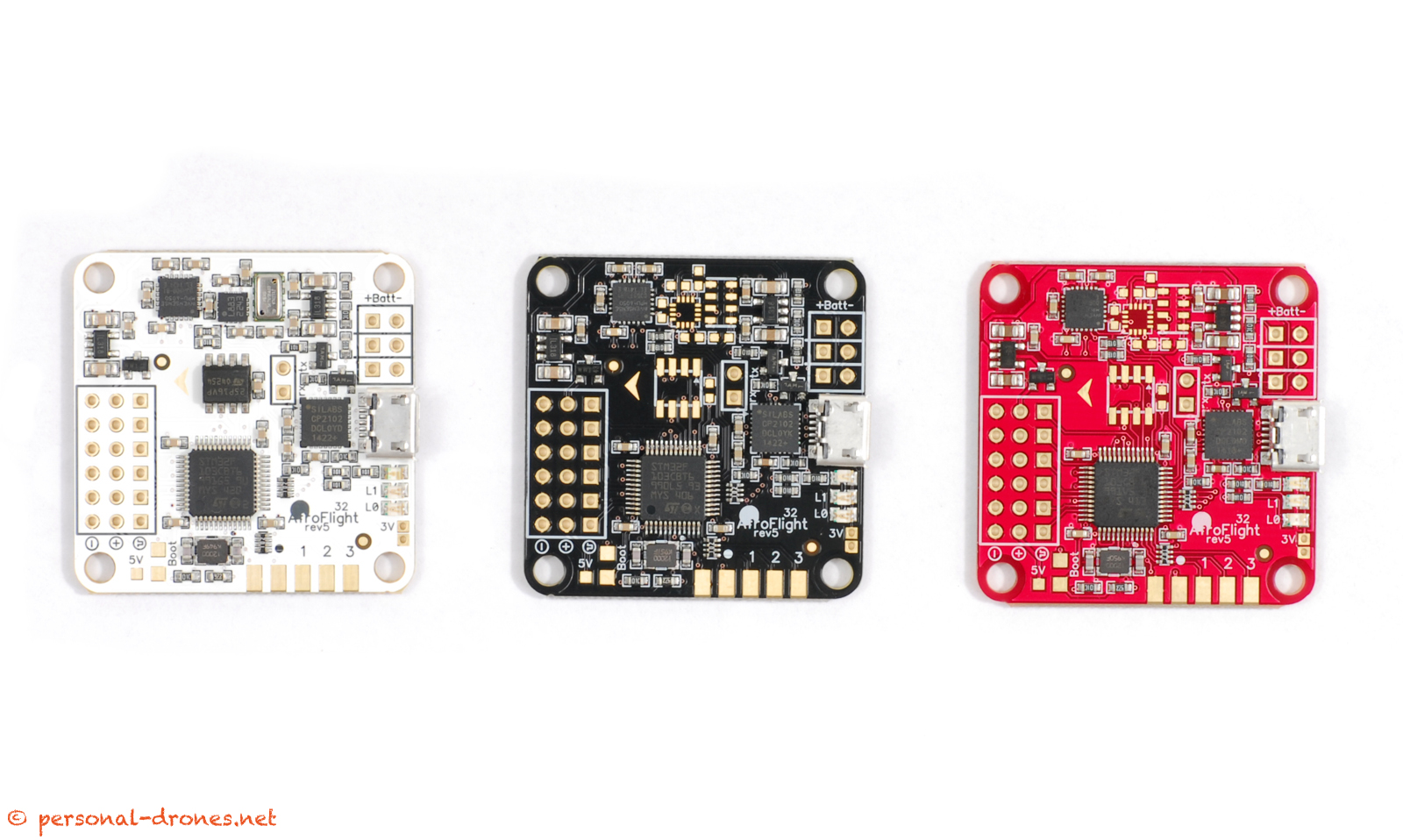
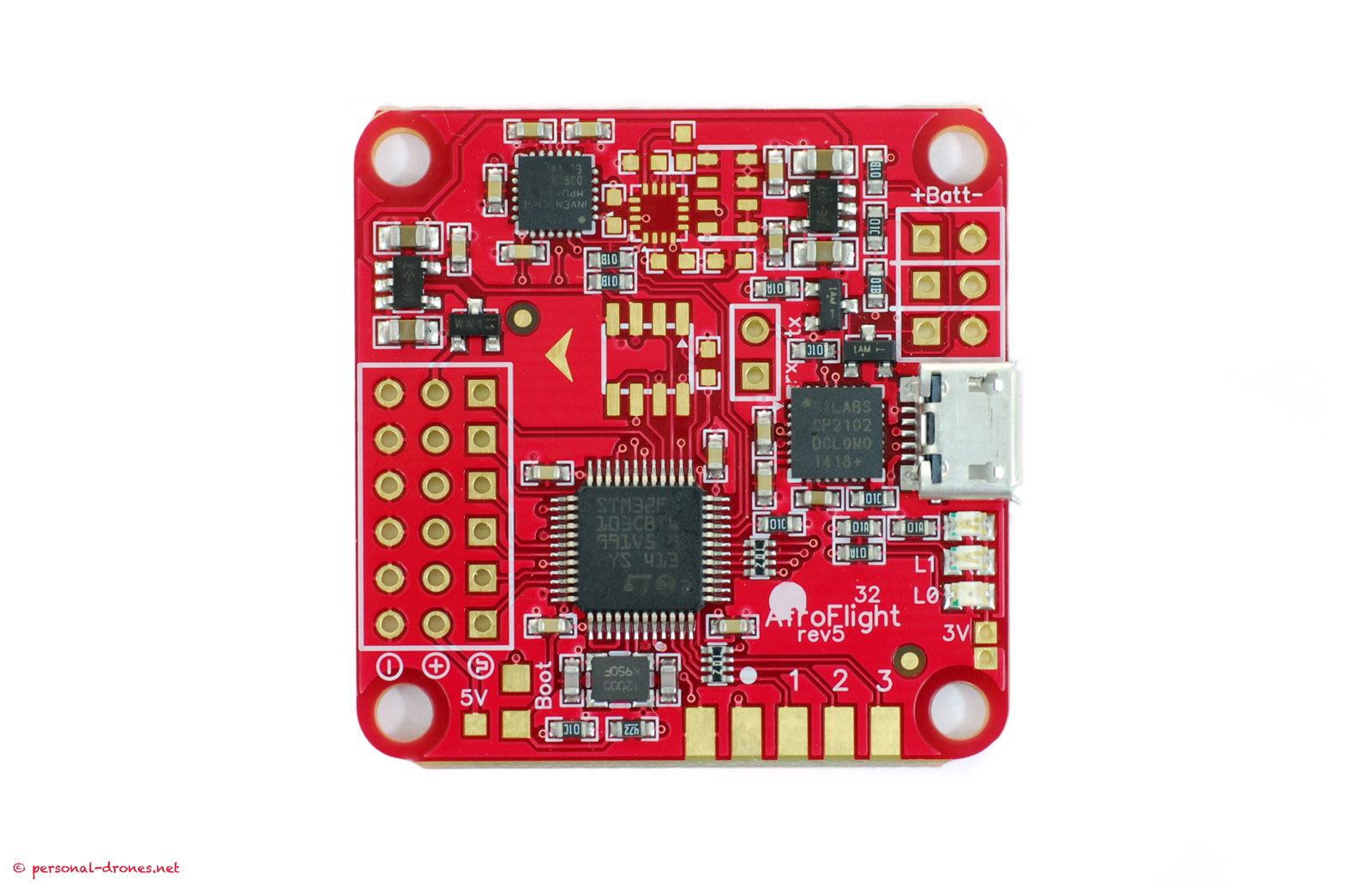
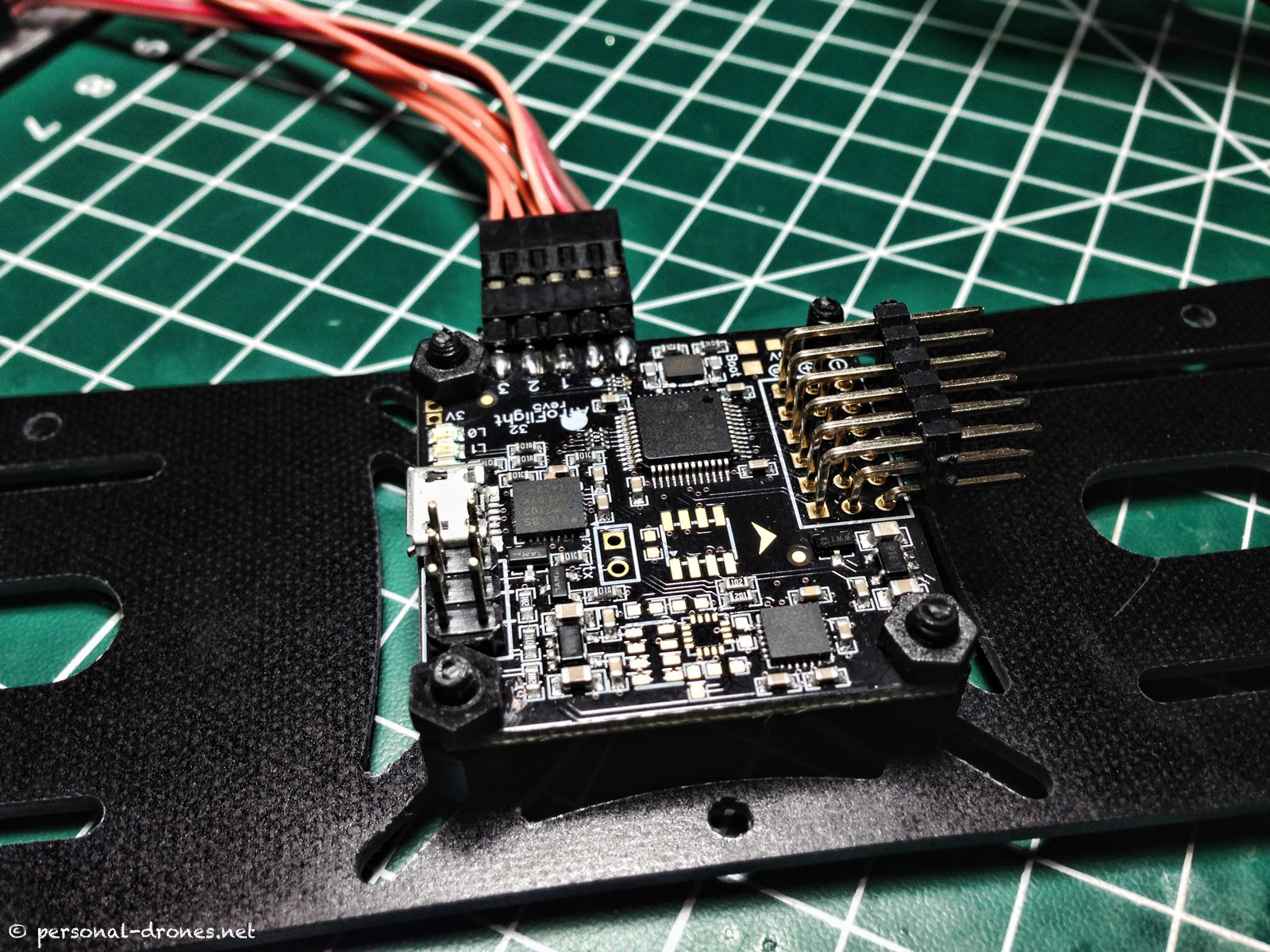
In this post, just a little photogallery with images of the AcroNaze32 flight control board. I ordered a few during the last months and each time they came into different colors (red, black, the last batch was white). Actually the white board on the photos below is the full Naze32 version with barometer rather than the Acro version.
Naze 32 board. Black and red are the Acro version, white is thje “full” version with barometer
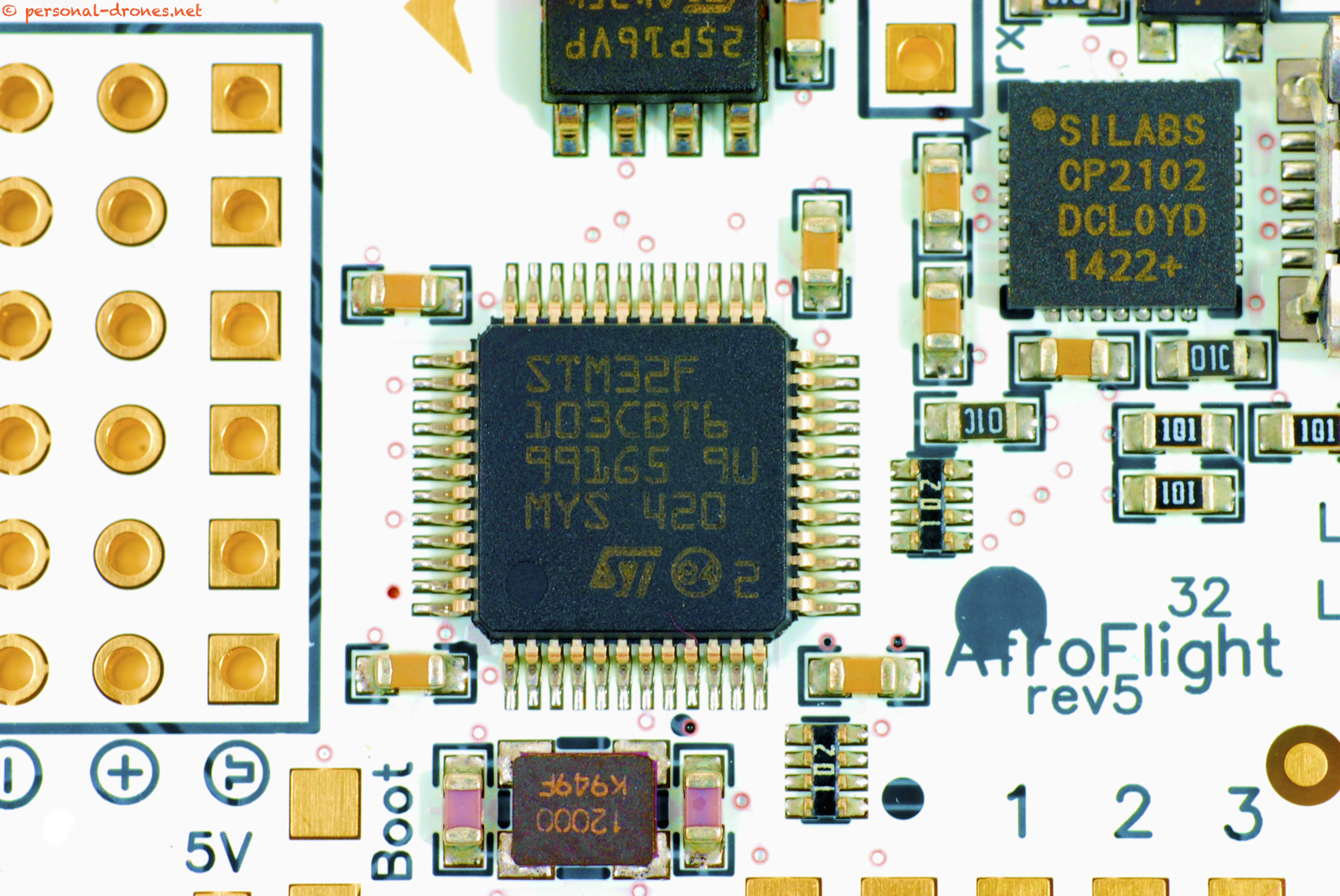
Naze 32 rev5 Flight control board white edition close up
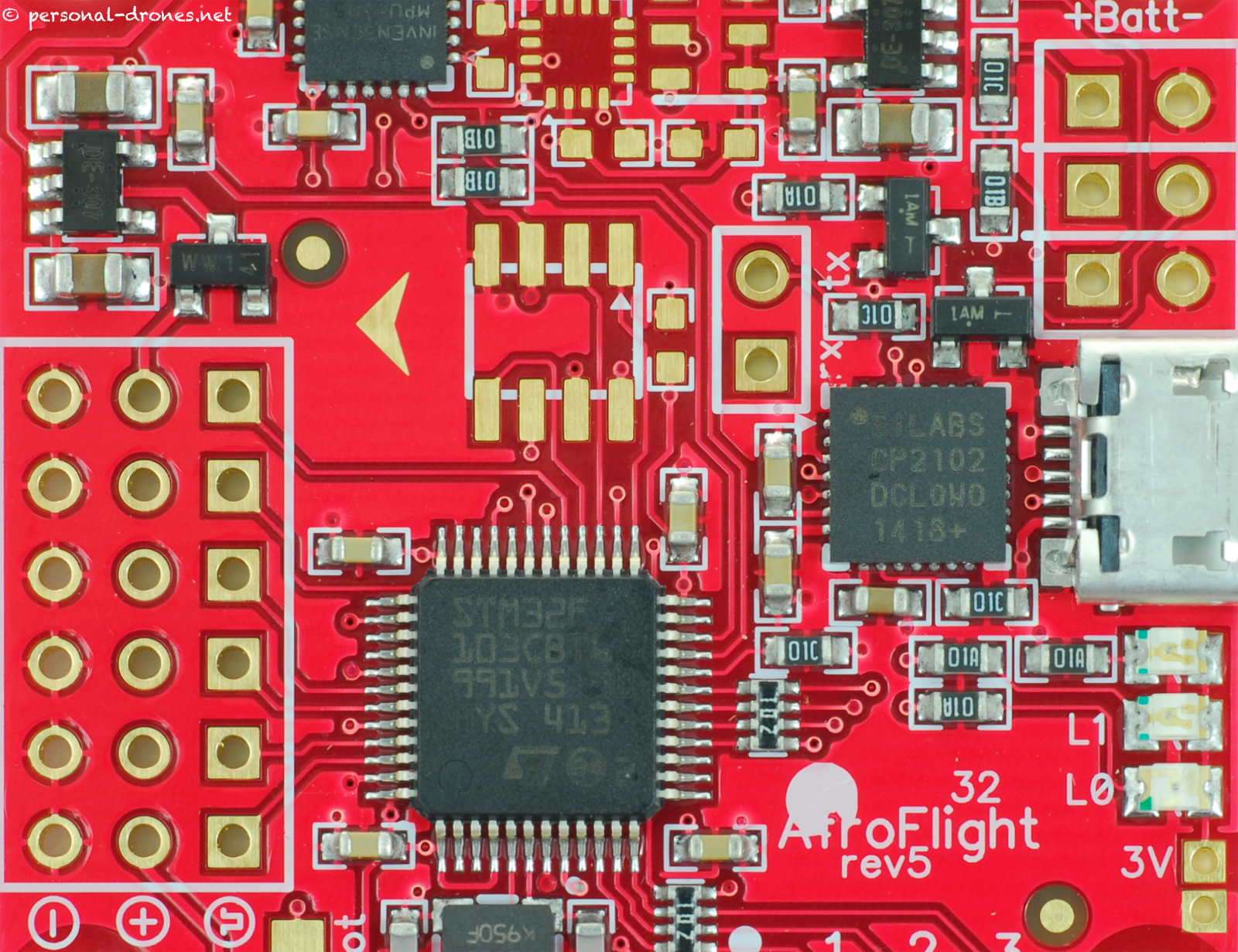
Acro Naze 32 rev5 Flight control board close up
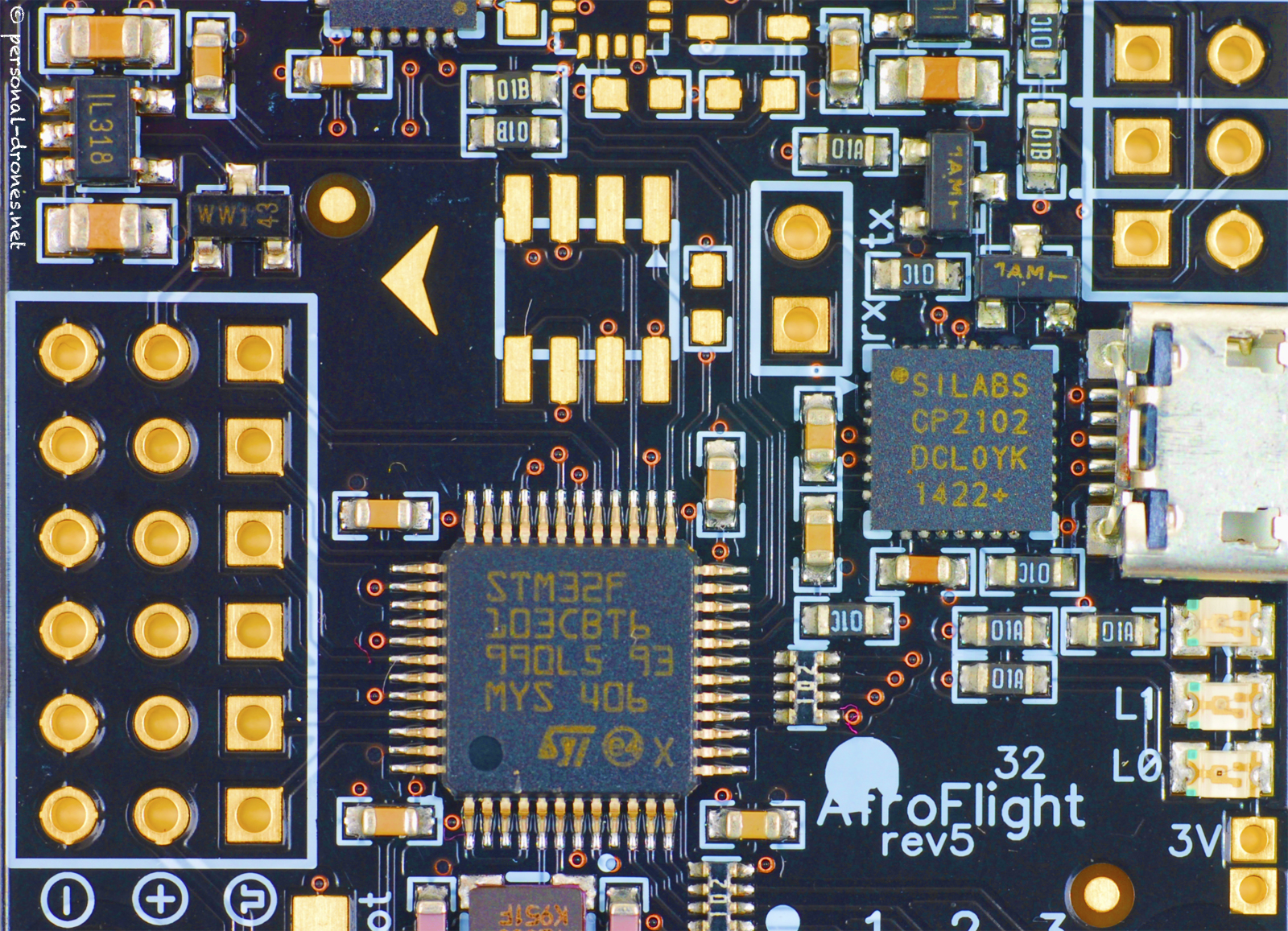
Acro Naze 32 rev5 Flight control board black edition close up
Acro Naze 32 rev5 Flight control board
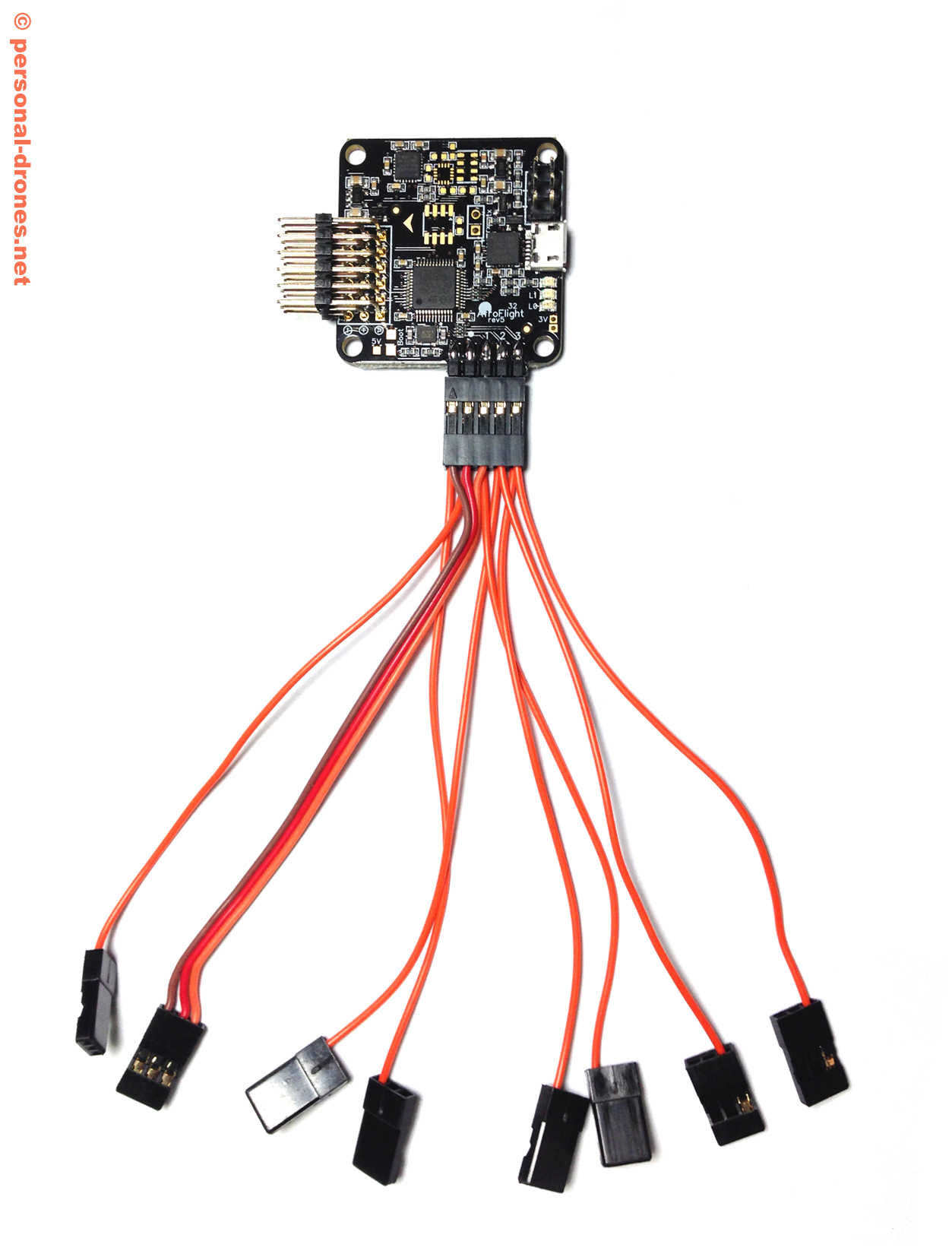
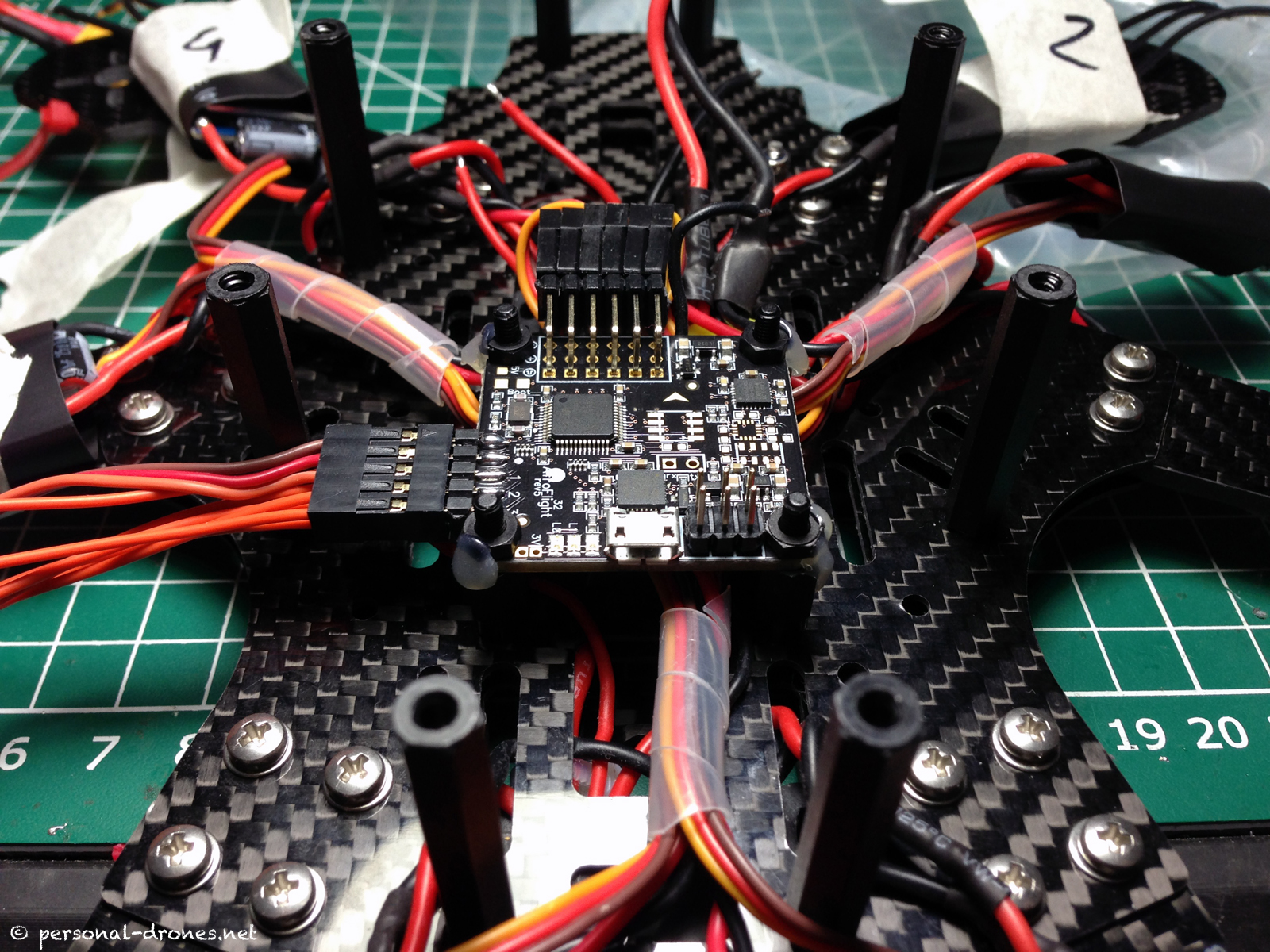
Acro Naze32, “the octopus”
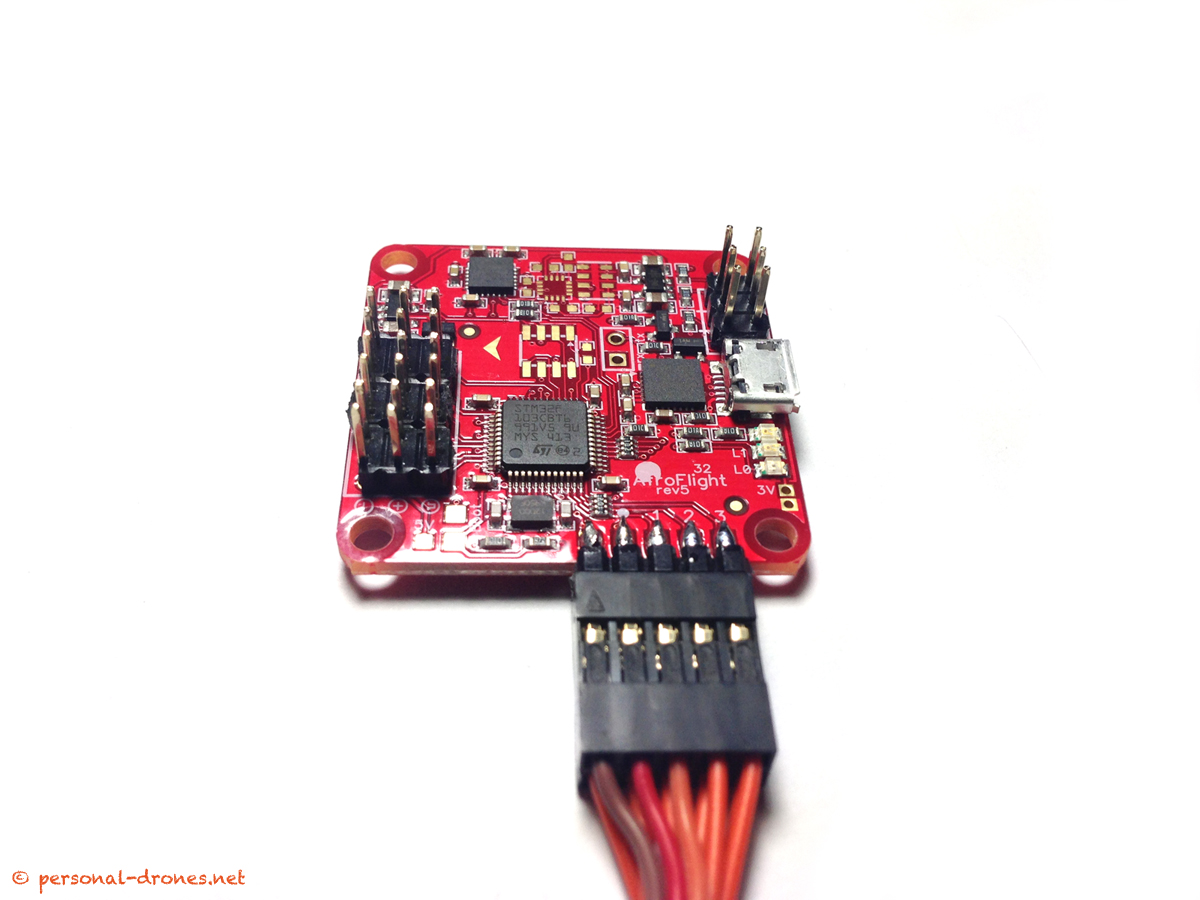
Acronaze32 Rev5 flight control board
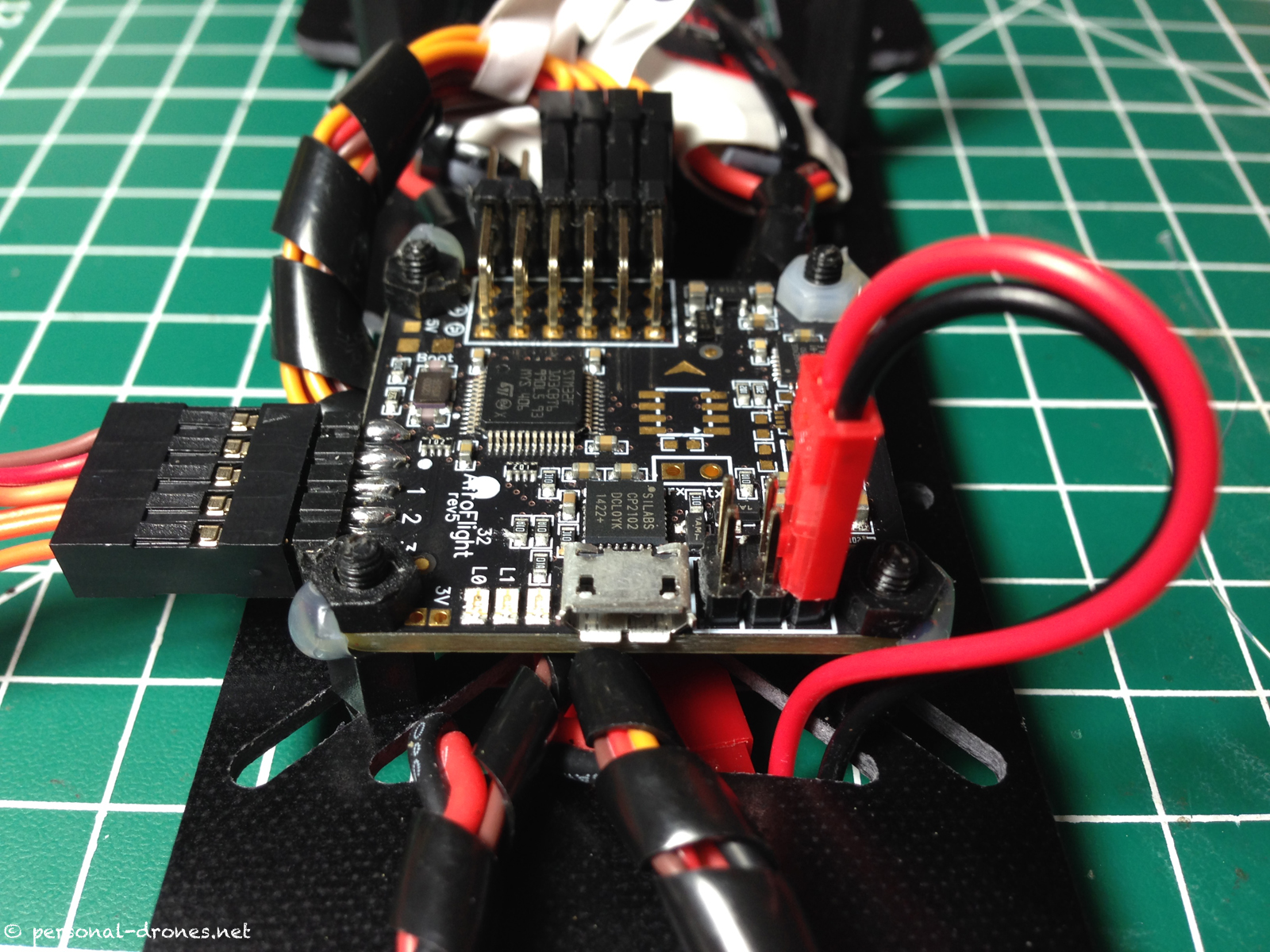
AcroNaze 32 board in place, voltage sensing cable from the power distribution system in place
Fittng the AcroNaze32 on the FlyXcopter FlyX-Mini flight controller mount
AcroNaze32 on Blackout Mini Spider Hex
A quest toward the perfect quadcopter or multirotor for aerial video and personal flying freedom and a permanent survey on the latest quadcopter news and multirotor news
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish.AcceptPrivacy and Cookies Policy
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.