Yesterday was a nice day out flying with the quadlugs 480mm, equipped with an SJ4000 camera, Immersion RC transmitter and Skylark OSD. It really adds another dimension to be able to know in real time, from the OSD, the GPS position, time of flight, battery voltage, altitude. All this information provides a different level of control while flying the quad.
I found particularly valuable to know how hight and how far from me the quad was, exactly.
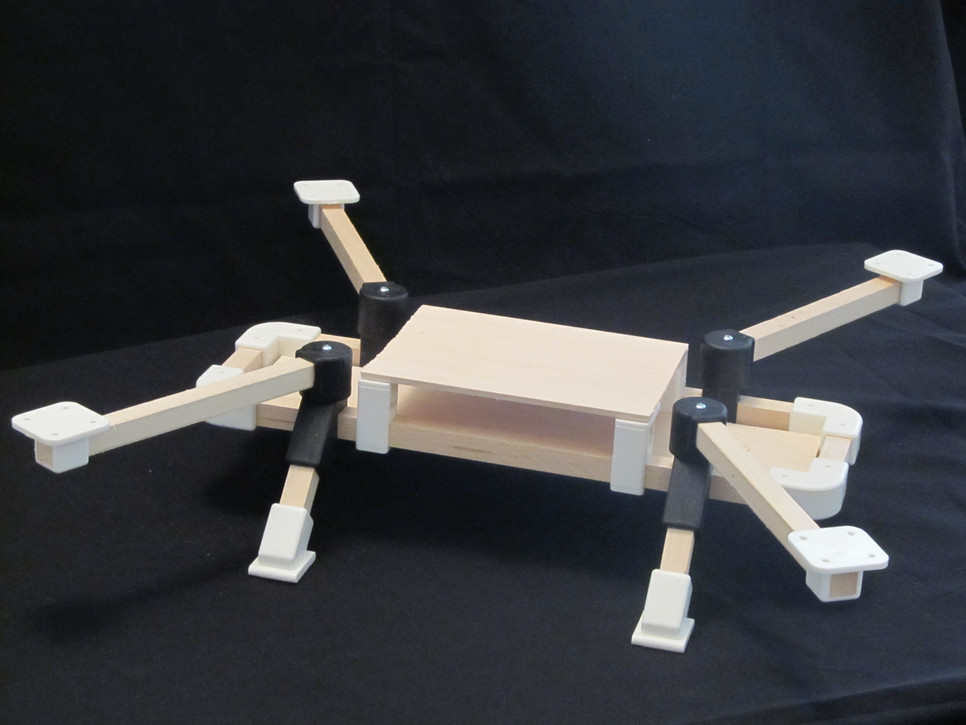
I’d like to share a couple of shots of the quad here. A usual, you can click on the pictures to access the full sizes (which sometimes take a while to load, thanks for your patience 🙂 )
Check out the Quadlugs website to see the latest models, several came out since my first quadlugs build a few months ago.