Call your drone by phone wherever you are with the SkyCall app and then let him guide you to destination.

Skycall is a project developed in the Senseable City Lab of the MIT.
Read the story and watch the video:
Call your drone by phone wherever you are with the SkyCall app and then let him guide you to destination.
Skycall is a project developed in the Senseable City Lab of the MIT.
Read the story and watch the video:
Here’s a very interesting article on the topic of the surveillance of US border by drones. Were a not talking quadcopters, it’s about the “real” drones, which can stay up 20 hours and patrol large areas. From the article, it appears that the program yields results, however it is very expensive and shows some limitations.
 Image source: wikipedia
Image source: wikipedia
Can I fly a private drone in my state? A map helps to answer this question, here it is:
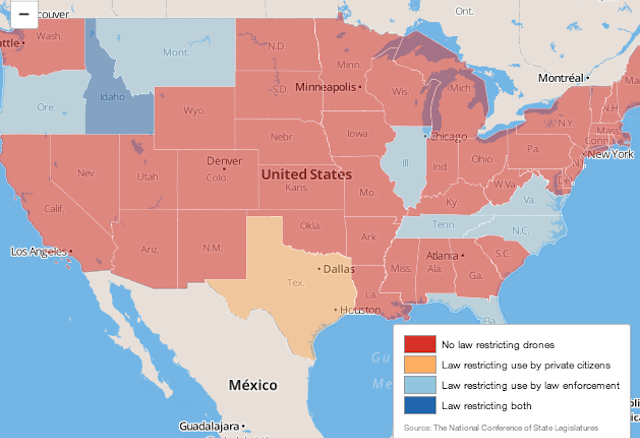
Source: see the original interactive map here
Prof. Adrian Lauf from Louisville University, specialist in embedded systems, talks about drones and potential applications – Link
Deer Trail, a small city in Colorado, has been releasing licenses to shoot surveillance drones, at 25$ each. The vote on releasing the licenses was actually delayed, maybe also because the FAA warned that shooting UAVs is a crime.
The licenses release looks more as a political/promotional move at the moment, as it appears that as of today no drone was seen flying over Deer Trail.
Here is a video that features the story:
Here are a couple of related files:
Source: http://www.deertrailcolorado.com/
Source: http://www.droneshooters.com/
Found this video that features a long interview to Prof. Alan Frazier on the subject of drone usage in law enforcement, in which he also answers questions from the public.
Prof. Frazier has a very particular curriculum, as he is both a Professor at the North Dakota University, Department of Aviation and Deputy Sheriff in the Grand Forks County Sheriff’s Department (link). This puts him in a strong position to deeply understand the technical and legal background of quadcopters, multirotors and more in general UAV usage, and to apply this knowledge in the field, as a law enforcement officer. For these reasons it is of particular interest to hear his views on the subject of UAV and law enforcement. Here’s the video:
For some quick examples of how drones were used recently by Prof. Frazier in the field, see this article
The Federal Aviation Administration (FAA) has released a list of entities that have applied for permission to fly drones – source. The status of the applications (whether they were accepted or not) was not released, despite the EFF had asked for this information.
Interestingly, the list contains a number of authorities, sheriff’s offices but also several Universities. This fits well with the very diverse tasks you can accomplish with those flying machines. It looks kind of strange to me that the National Aeronautics & Space Administration has to ask FAA for a permission to fly something, I would guess anybody has to.
Here’s the list:
Proponent
1 Arlington PoliceDepartment (Texas)
2 Barona Band of Mission Indians Risk Management Office (California)
3 California Department of Forestry and Fire Protection
4 California State University, Fresno
5 Canyon County Sheriff’s Office (Idaho)
6 City of Herington (Kansas)
7 City of Houston, TX Police Department
8 City of North Little Rock, AR ‐ Police Department
9 Clackamas County Sheriff’s Office (Oregon)
10 Cornell University
11 Defense Advanced Research Projects Agency
12 Department of Energy ‐ Oak Ridge National Laboratory
13 Department of Homeland Security ‐ Science and Technology
14 Department of Homeland Security ‐ Customs and Border Protection
15 Department of the Interior ‐ National Business Center/Aviation Management Directorate
16 Eastern Gateway Community College
17 Federal Bureau of Investigation
18 Gadsden Police Department (Alabama)
19 Georgia Tech Police Department, Office of Emergency Preparedness
20 Georgia Tech Research Institute
21 Grand Forks County Sheriff’s Department (North Dakota)
22 Hays County Emergency Service Office (Texas)
23 Indiana State University
24 Kansas State University
25 King County Sheriff’s Office (Washington)
26 Lorain County Community College
27 Medina County Sheriff Office (Ohio)
28 Mesa County Sheriff’s Office (Colorado)
29 Miami‐Dade Police Department (Florida)
30 Middle Georgia College
31 Middle Tennessee State University
32 Mississippi Department of Marine Resources
33 Mississippi State University
34 Montgomery County Sheriff’s Office (Texas)
35 National Aeronautics & Space Administration
36 National Institute of Standards and Technology
37 National Oceanic & Atmospheric Administration
38 New Mexico Institute of Mining and Technology
39 New Mexico State University ‐ Physical Science Laboratory
40 Nicholls State University
41 Northwestern Michigan College
42 Ogden Police Department (Utah)
43 Ohio Department of Transportation
44 Ohio University
45 Orange County Sheriff’s Office (Florida)
46 Oregon State University 7 Otter Tail County (Minnesota)
48 Pennsylvania StateUniversity
49 Polk County Sheriff’s Office (Florida)
50 Seattle Police Department (Washington)
51 Sinclair Community College
52 Texas A&M University (TAMU) ‐ Corpus Christi
53 Texas A&M University (TAMU) ‐ Texas Engineering Experiment Station
54 Texas Department of Public Safety
55 Texas State University
56 U.S. Air Force
57 U.S. Army
58 U.S. Department of Agriculture – Agriculture Research Service
59 U.S. Department of Agriculture ‐ Forest Service
60 U.S. Department of Energy ‐ Idaho National Laboratory
61 U.S. Department of Energy ‐ National Energy Technology Laboratory
62 U.S. Department of Justice ‐ Queen Anne’s County Office of the Sheriff
63 U.S. Department of State
64 U.S. Marine Corps
65 U.S. Navy
66 University of Alaska, Fairbanks
67 University of Arizona
68 University of California, Davis
69 University of California, Merced
70 University of Colorado, Boulder
71 University of Connecticut
72 University of Florida
73 University of Michigan
74 University of North Dakota
75 University of Oklahoma
76 University of Wisconsin
77 Utah State University
78 Virginia Commonwealth University
79 Virginia Polytechnic Institute & State University
80 Washington State Department of Transportation
81 West Virginia University
And here’s a report on another quadcopter out of control, that ended up colliding with the Sidney Harbour Bridge. It was found near to one of the pilons of the bridge. No information has been released on the specific model, however a GoPro attached is mentioned. The police is investigating the footage on the sd video card.
“At this stage police don’t believe that the quad-copter is suspicious”
Good to know the quadcopter is not “suspicious”, looks like by default a quadcopter could indeed be suspicious. This is an interesting observation. In people’s mind quadcopters are related to drones, and drones are for surveillance, hence the suspiciousness I would guess.
Here’s the full article
A statement by Peter Gibson, Civil Aviation Safety Authority

The Sidney Harbour Bridge – Source: wikipedia
Update: “Counter-terrorism officers monitor police and aviation authority search for owner of quadcopter found near pylon. The authority is downloading data from the drone’s control system to try to find its owner”. Read the story
Just found a great, generous article on the increasing diffusion of private amateur drones on wired, by Chris Anderson, cofounder of 3D Robotics.
Read it here: “How I Accidentally Kickstarted the Domestic Drone Boom“
{kind=link}
{kind=link}